
機械系-精密裝備與機器人技術團隊-郭麗峰
精密裝備與機器人技術團隊介紹
團隊名稱
精密裝備與機器人技術團隊
團隊簡介
精密裝備與機器人技術團隊成立于2012年,主要從事機器人技術與應用、智能裝備數字化設計與制造、精密測量與儀器智能化等方向科研工作。團隊先后完成北京市屬高校創新能力提升計劃項目、北京市青年拔尖人才項目、北京市組織部項目,以及企業委托等項目20余項,發表論文30余篇,獲專利10余項,培養碩士研究生16人,本科畢業生120余名,研究成果得到產業化應用推廣、填補了國內空白。團隊教師指導學生參加“互聯網+”、“挑戰杯”、“全國機器人錦標賽”等科技競賽并獲獎。
團隊與清華大學機器人與自動化技術及裝備研究室、天津大學精密測試技術及儀器國家重點實驗室、中國康復研究中心、北京理工大學光機電微納制造團隊、北京永新醫療設備有限公司、北京鴻鵠敏行科技發展有限公司、北京恒正精機科技有限責任公司、北京微度科技發展有限公司等有著密切交流合作和人才聯合培養機制。
典型工作介紹如下:
(1) 大型醫學影像設備SPECT機電系統研制
在大型醫學影像設備SPECT機電系統研發相關課題中,基于CAD/CAE、虛擬樣機技術完成了設備機電系統建模與優化設計;研制了基于Ethernet和CAN總線的分布式多軸運動控制,實現了人體輪廓自動跟蹤功能;提出將幾何標定與系統綜合指標標定相結合的方法,實現設備標定與誤差補償。
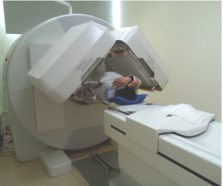

圖1 國內首臺可變角雙探頭臨床通用型SPECT
在國內率先完成了大型醫學影像設備SPECT機械及運動控制系統研發工作,參與完成的國產首臺可變角臨床通用型SPECT經國家食品藥品監督管理總局審批通過(國械注準20173330681),獲準上市。該設備入圍工信部《首臺(套)重大技術裝備推廣應用指導目錄(2019版)》(編號:13.10.8),對推動SPECT在我國實現精準醫療和大型核醫學設備的國產化具有重要意義。
(2) 低溫共燒陶瓷(LTCC)產線熱切機研制
LTCC(Low-temperature co-fired ceramics, 低溫共燒陶瓷)技術可實現高集成度、高性能的多層芯片模塊化設計電子封裝,廣泛用于高精度片式元件、無源集成功能器件、無源集成基板、功能模塊等集成器件制備。目前我國的LTCC生產工藝線基本依賴進口,使得相關產業發展受到限制。突破LTCC工藝實現的關鍵技術、研發自主LTCC產線裝備成為我國集成器件技術發展的迫切需求。
團隊在國內率先研發了可應用于LTCC自動化產線的全自動熱切機,實現了裁切、撕膜工藝流程的全自動化。提出了雙目視覺與伺服運動相結合的智能在線標定技術,實現相機坐標系、工件坐標系、刀具位置的一鍵在線自動標定,裁切精度達到10 μm。完成3臺全自動熱切機研制,已裝備于LTCC自動化產線。
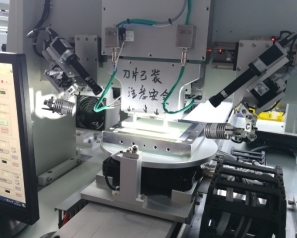
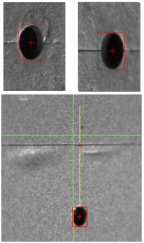
圖2 基于雙相機視覺位置校正的LTCC熱切機 圖3 標志孔定位裁切
(3) 高精度光纖陀螺閾值測試技術
參考級光纖陀螺在戰略導彈、衛星、潛艇、航母等的高精度、長航時慣性導航系統中擔當重要角色,應用需求迫切。角定位精度測定是高精度光纖陀螺研制過程中的關鍵環節,目前國內沒有完全滿足參考級光纖陀螺角定位測定需求的產品,國外相關設備處于對華禁售狀態。項目團隊綜合采用高精密氣浮軸系、基于力控的角度粗調與基于摩擦環的角度微調機構方案,研制成功適用于參考級光纖陀螺測試用的高精度角定位裝置。經中國計量院檢定,設備角定位分辨力0.1角秒,角度定位精度0.2角秒,測角重復性0.06角秒,達到國內領先水平。
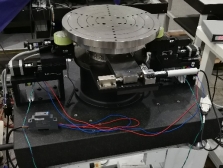

圖4 高精密轉臺 圖5 中國計量院檢定結果
(4) 輪腿式移動機器人技術
在移動機器人相關課題研究中,提出了一種新型的輪腿式變結構移動機器人。將四足哺乳動物腿式運動方式與輪式機構相結合,實現了輪式、腿式、輪腿結合等多種運動模式;基于分布式多智能體(Agent)與中樞模式發生器(CPG)實現輪腿式移動機器人姿態規劃與運動控制;基于多傳感器信息融合與模糊控制技術實現一定機器人的自主避障與導航。
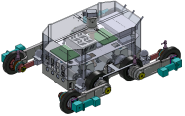


圖6 輪腿式移動機器人
(5) 加工機器人技術
在加工機器人相關課題研究中,研制了基于工業機器人的7軸柔性加工系統。基于該平臺,進一步開展了基于CAD-CAM-Robot數據鏈的機器人柔性加工自動化、智能化技術研究。相關技術可應用于中大型、復雜三維曲面的加工制造,如大型葉片模具加工,假肢接受腔模具制作等。
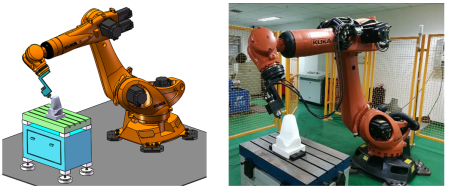
圖7 基于工業機器人的假肢接受腔陽模加工技術研究
(6) 學科競賽獲獎
團隊指導學生在各類學科競賽中獲獎,榮獲“億豐升華杯”第十五屆全國機器人錦標賽暨第四屆國際仿人機器人奧林匹克大賽 半自主型11vs11機器人足球項目二等獎、半自主型5vs5機器人足球項目二等獎、仿真型11vs11機器人足球項目三等獎, “挑戰杯”首都大學生課外學術科技作品競賽三等獎,第三屆中國“互聯網+”大學生創新創業大賽(北京賽區)二等獎, 第五屆中國“互聯網+”大學生創新創業大賽(北京賽區)二等獎,第七屆中國“互聯網+”大學生創新創業大賽北京賽區一等獎、國賽銅獎。

圖8 基于工業機器人的假肢接受腔陽模加工技術研究
團隊成員
郭麗峰,林順英
成員簡介
另附文件